- 자율주행기술 개요 외부환경을 자동차에 탑재된 다양한 센서를 통해 인식한 후 운전자의 개입 없이 주행상황을 판단하고 자동차를 제어자동차 IT융합기술이 발전함에 따라 운전자의 편의를 위해 자동차 스스로 주변상황을 판단하고 주행할 수 있는 자율주행기술 연구가 활발히 진행
- 2. 자율주행 기술 수준(국제자동차기술자협회의 자율주행 기술 분류(6단계))이. 국제자동차기술자협회의 자율주행 기술 분류(6단계) 단계 Level 0 Level 1 Level 3 Level 4 Level 5 제어 주체 인간 + 시스템 시스템 주행 책임 인간 시스템
- 정의
- 운전자 상시 주행
- 시스템이 차간거리 유지 등의 보조
- 특정 조건에서 일정 시간 보조수행 고속도로와 같은 구간에서 주행 담당, 필요 시 운전자 개입 제한 상황(예; 악천후)을 제외한 대부분의 도로에서 자율주행 운전자 불필요, 시스템이 모든 조건에서 주행 담당자다. 자율주행기술수준 ADAS의 센서결합 정도에 따라 분류단계 설명이거나 단계센서에서 데이터를 수집하는 단계로, Radar, LiDAR, Camera 등의 인지센서에서 외부환경정보를 수집하고 가공판단단계이거나 시스템에서 수집된 정보를 통해 상황에 대한 적절한 경로 및 움직임을 결정하는 단계로 자동차의 사각지대 및 환경적 영향에 따라 발생할 수 있는 인지오류를 보완하기 위해 실시간 도로환경정보를 제공하는 정밀지도와 다른 자동차정보를 알 수 있는 Vehicleto Everything(V2X)통신정보를 융합하여 정확한 계통이다.되고 있으며, 이러한 약점은 자율주행 자동차의 주행상황 인지과정에서 치명적인 오류를 발생시킬 수 있으며, 이로 인해 인명피해나 경제적 피해가 발생할 수 있다.
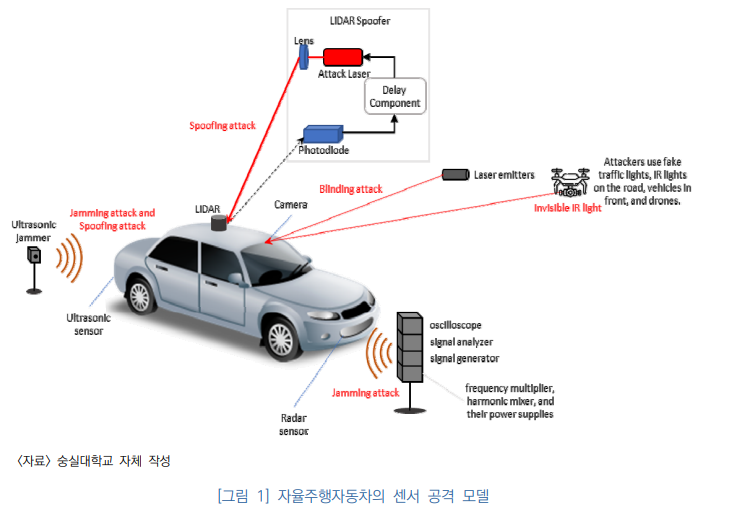
- 3. 자율주행차 센서 공격 모델
최근 자율주행자동차 센서를 대상으로 한 다양한 취약성 분석에 관한 연구가 발표됐으며, 이러한 취약성은 자율주행자동차의 주행상황 인지과정에서 치명적인 오류를 발생시킬 수 있으며, 이로 인해 인명피해나 경제적 피해가 발생할 수 있다.
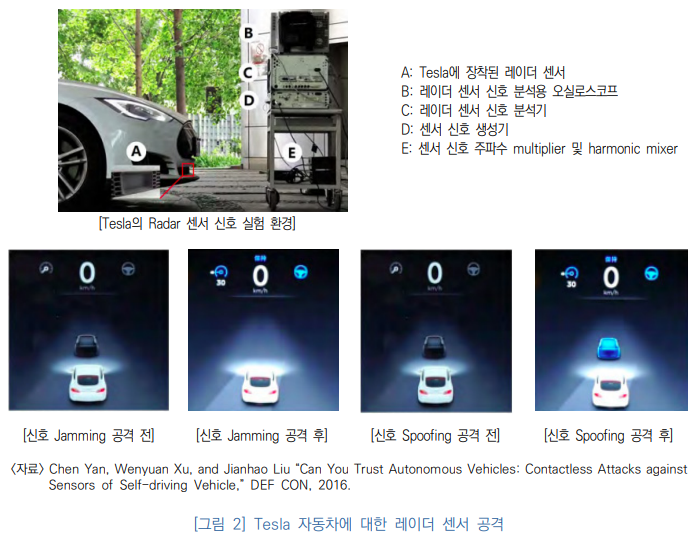
4. 센서 공격형 노래. Radar 센서 공격도
신호 분석기를 사용하여 Tesla 레이더 센서의 주파수 대역, 변조 방식 및 파형 패턴을 식별한 후 신호 발생기에서 생성된 동일 주파수 대역의 전자파(Electromagnetic wave)로 레이더 센서에 대한 재밍 및 스푸핑 공격 가능
B. LiDAR 센서 공격 LiDAR 기반 인식에 대한 적대적 센서 공격: 가짜 장애물(fakeobject)을 통해 실험 자동차의 비상 브레이크(Emergencybrakeattack)를 작동시키는 공격을 카메라와 LiDAR에 보이지 않는 사례: 케메라 센서와 LiDAR 센서에 동시에 오류를 주입하기 위해 LiDAR 센서의 포인트 클라우드 위치와 카메라 센서의 이미지 픽셀 값을 모두 변경할 수 있는 물리적 적대 사례(Physical Adversarial Example) 생성
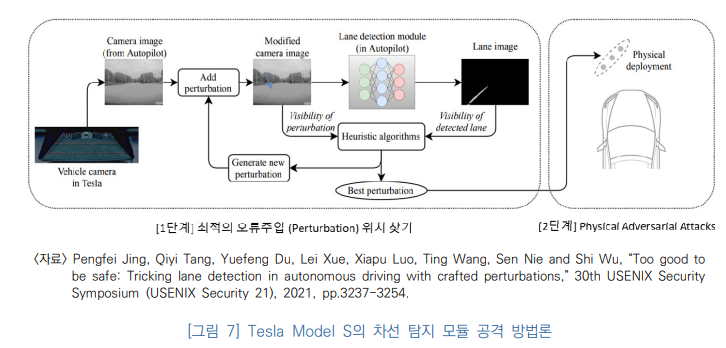
C. Vision(Camera) 센서 공격 ADAS의 팬텀: 카메라 센서에 의해 탐지된 물체가 실제 이미지인지 빛으로 투영된 가짜 이미지(Phantom)인지 분류할 수 없는 문제 안전성 문제 발견(Too Go Be Safe): 차선 탐지 모듈이 차선을 잘못 인식하도록 가짜 차선을 생성하는 공격 방법
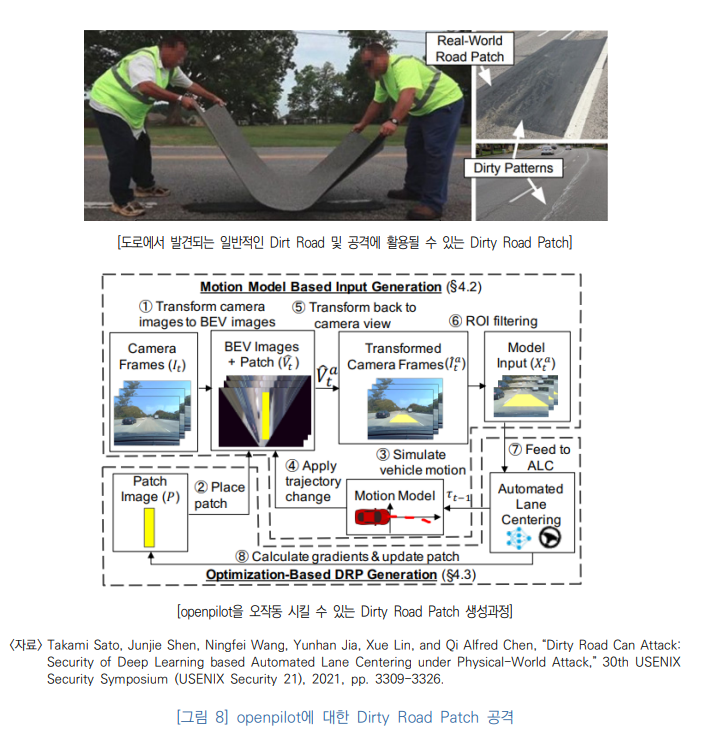
더티로드 공격 가능(Dirty Road Can Attack): 방법론은 ALC 시스템이 카메라 센서를 기반으로 작동하는 점을 이용하여 도로 공사, 자연 재해 등의 이슈로 인해 오염된 도로 패턴과 유사한 어드밴스 arial example 생성
원 문 : https://www.itfind.or.kr/publication/regular/weeklytrend/pastList/read.do?selectedId=1240&selectedCategory=B_ITA_01&pageSize=10&pageIndex=0