국토교통부가 자율주행 서비스와 사업모델 발굴을 위해 시행한 ‘자율협력주행 및 C-ITS 신규 서비스 아이디어·사업모델 공모전’에서 임휘진(도시행정학과 17) 학생이 서비스 아이디어 부문 대상의 영예를 안았다. 수상자에게는 국토교통부 장관상과 상금 500만원이 수여됐다.
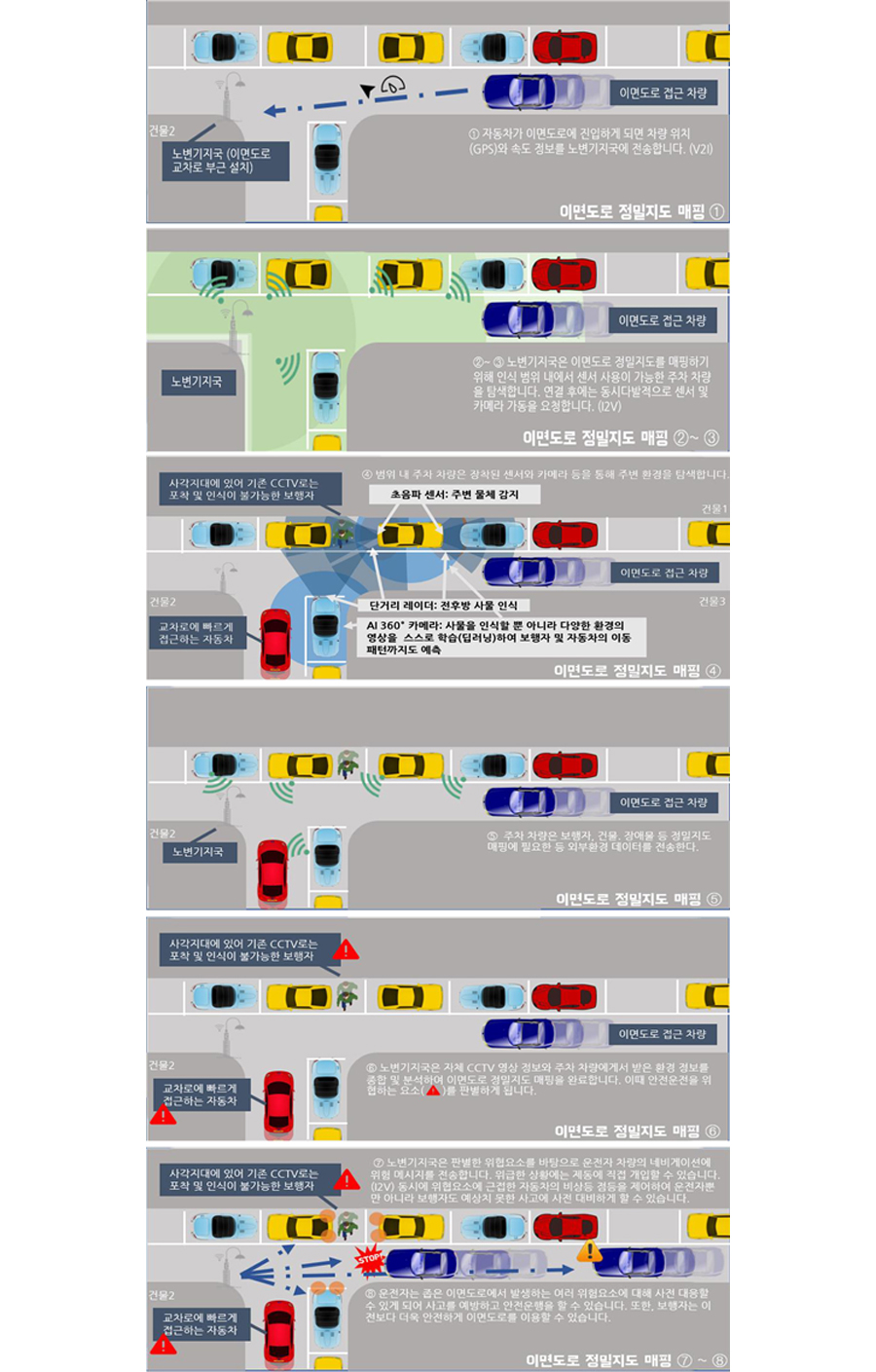
임휘진 학생이 선보인 ‘이면도로 안전주행을 위한 실시간 정확도 지도 구축 시스템’은 C-ITS 노변통신 기지국과 차량이 협력해 사고 발생 빈도가 높은 이면도로 정확도 지도 변경 사항을 실시간 취득·활용할 수 있는 아이디어로 구체적인 방안을 제시했다는 측면에서 좋은 평가를 받았다.
자율주행은 자율주행차나 기존 차량이 차량-도로 간 협력주행시스템(C-ITS), 정밀도로지도 등 인프라와 협력해 안전한 도로주행을 구현하는 기술이다.
국토부에 따르면 한국교통연구원이 주최하고 자율주행산업발전협의회가 후원한 이번 공모전에는 총 97개 팀이 접수해 산·학·연 전문가로 구성된 심사위원회의 서류심사, 최종발표심사를 거쳐 수상작을 선정했다. 공모전 우수 수상작은 대전~세종 차량-도로 간 협력주행시스템(C-ITS) 실증사업과 민간 참여형 자율주행 시험공간(리빙랩)에 시범 적용될 예정이다.
V2I, I2V를 활용한 정밀도로지도 구축을 통해 이면도로안전성 제고 임휘진(도시행정학과17) 학생수상소감
주택가 골목길처럼 도로 폭이 좁고 차도와 보도의 구분이 없는 이면도로가 국내 도심 지역에 많습니다. 그런데 이면도로에서는 골목 옆에 차량이 주차되어 있는 경우가 많고 사각지대가 많아 매우 위험하다고 느꼈습니다. 제 경우 차를 피해 골목에 달라붙어 걷거나 차가 지나갈 때 잠시 멈춰서 기다리는 습관이 있습니다. 안전한 보행환경을 조성하고 운전자의 편의를 증진하기 위해 차량과 도로 인프라가 협력하는 방안을 구상하게 되면서 보행자의 움직임을 실시간으로 탐지해 운전자에게 위험 메시지를 전송하고 필요한 경우 자동으로 차량 브레이크를 제어해주면 된다는 생각을 하게 되었습니다.
기존 CCTV나 보행자 열화상 카메라로 골목 사각지대에 놓인 보행자와 차량까지 탐지하려면 센서망을 촘히 구축할 수밖에 없어 비용이 많이 듭니다. 때문에 이에 대한 대안으로 추가적인 센서 인프라 구축 없이 자율주행차 카메라, 단거리 레이더, 초음파 센서 등을 이용해 주변 환경을 탐지하자는 아이디어를 제시했습니다.
교통 분야의 비전공자이지만 교통에 대한 순수한 관심으로 평소 아이디어가 많고 관련 자료도 많이 접했습니다. 노후한 골목길과 좁은 보도가 많은데 제 아이디어가 적용되어 보행자의 안전을 지키고 교통사고도 예방되면 보람이 있을 것입니다.