#차선인식 #OpenCV #영상처리 #차선곡률 #자율주행
[0] 개요: 자율주행 프로젝트에서 카메라를 이용한 차로인식을 학부생 기간 동안 연구하였다. 이 부분에 대해서 공유하려고 이 글을 썼다. 코드에 대한 부분은 향후 깃허브를 통해 업로드한다. 다음 글은 이론적인 부분을 쓴다고 생각하면 된다.
실제로 최근 진행되고 있는 차로인식 연구는 딥러닝 기반으로 이뤄지고 있다. Feature 기반의 차선인식 process는 old한 방식에 한계점도 많이 존재한다. 대표적으로 다음과 같다.
#1. 조도에 따른 차선색 검출치를 매번 변경해야 하는 점 #2. 도로 폭에 따라 ROI 영역을 다르게 해야 하는 점 #3. 정확한 곡률 추종에 한계가 있어 급격한 커브 구간에서 탈선하는 경우가 발생한다.
그런데도 해당 프로세서를 우리 플랫폼에 적용하려고 하는 이유는 이하와 같다.플랫폼에서 이미 object detection 문제를 풀기 위해서 Yolov4를 돌리고 있는데 같이 돌리면 리소스가 한정적이어서 시스템 다운이 될 것 같은 점, 훈련이 번거롭다는 점이다.
[1] 파이프라인: 필자의 차선인식 프로세스는 다음과 같은 순서로 이루어진다.Katri가 제공하는 강의의 차선인식 pipeline에 학교 수업이었던 영상처리 과정에서 배운 전공지식을 추가했다.
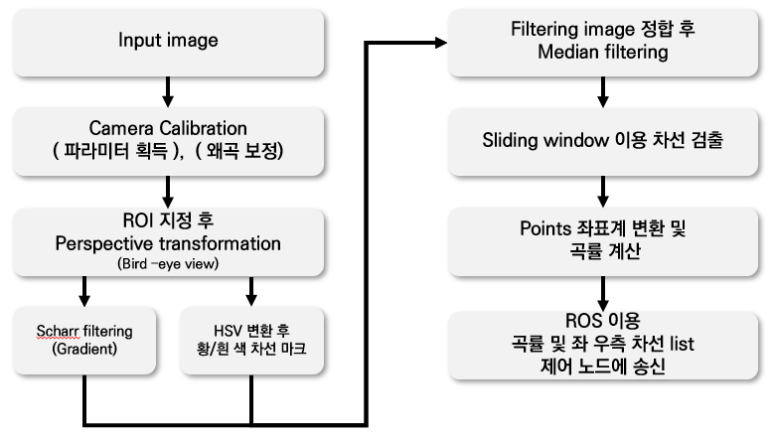
스텝 1. Camera Calibrati on을 가지고 있는 카메라로 영상처리를 적용하기 위해서는 카메라 내외의 파라미터를 구해야 한다. 이 파라미터를 구하기 위해서는 Python에서 제공하는 몇 개의 함수를 사용해 사용하는 카메라로 Checkerboard image를 취득한 후에 적용하면 된다. 이 내외부 파라미터를 가지고 있으면 왜곡을 보정할 수 있다.(뒤틀림 보정과 Calibration은 별도이다.)
아래 사진을 보면 검정색과 b lending 되어 있는 영역은 왜곡되어 있는 것을 확인할 수 있는데, 이는 광각 카메라를 사용할 경우 쉽게 확인할 수 있다. 이를 보정하면 왜곡에 대한 부분이 사라지게 될 것이다.적용할 경우 원본 이미지에서 끝 영역이 잘라져 보이는 현상을 확인할 수 있는데 이는 위의 설명이 그 이유라고 보면 된다.
주의: resize 하기 전의 원본 이미지를 Calibration 하여야 한다.
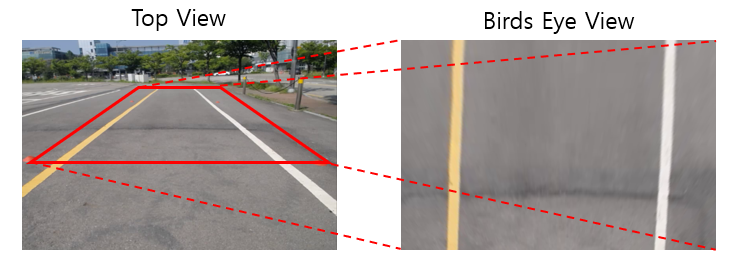
step 2. ROI 지정 후 Perspective transformation 왜곡이 보정된 이미지는 다음에 사용자가 임의로 4개의 ROI 점을 지정하고 Perspective transformation 을 적용하여 Bird-eye-viewimage로 전환한다. 이 과정을 다른 논문에서는 bird-eye-view conversion이라고도 하는 상당히 많은 연산량을 차지하고 있다.
여기서 나중에 말하겠지만, 우리가 가지는 ROI 4점의 실제 거리를 측정하면, 이것을 perspective transformation 을 적용하면 픽셀 당 몇 m 인지 확인할 수 있다. 이것은 후에 Local map 기반의 Purepursuits 횡제어, 곡률 기반의 PID 종제어에 적용하기 위해 필요한 task이다.
예를 들어 우리가 취하고자 하는 ROI 4점이 가로 4m 세로 3m이고, 우리가 resize 로 하는 이미지가 600 x 400이면 가로 4m/600으로 환산할 수 있다.
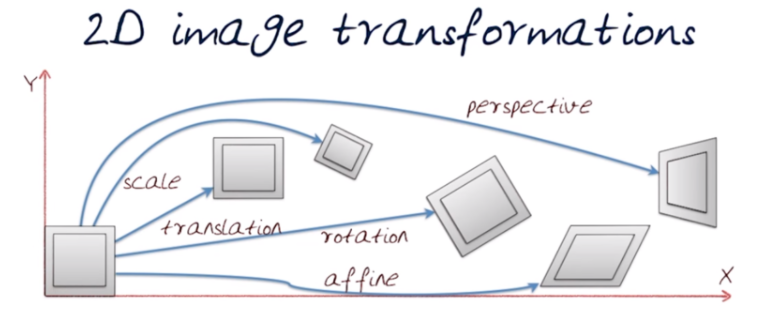
Perspe vtive transformation 은, 간단하게 말하면, 우리가 가지는 4개의 점을 각각 우리가 바라는 점에 이동시키는 것이라고 생각하면 된다. 4개의 ROI 점을 각각 재정의하는 화면의 정점으로 이동시키면, 그 안의 점은 perspective transformation 변환행렬을 통해 적절한 위치로 이동하게 된다. 이렇게 새가 바닥을 보는 듯한 bird-eye-view image가 만들어진다.
영상처리 수업에서는 해당 변환을 하기 전에 선행하는 단계의 변환이 있는데 이는 아래와 같다. 참고하기 바란다.

Step 3. Filtering 다음은 realw orld 이미지를 우리가 원하는 차선만을 골라내기 위한 filtering 작업에 대해 설명한다. 실제로 filtering에 대한 부분은 정답이 없다. Python에서 제공하는 filter를 이것저것 다르게 적용하면서 본인의 사양에 맞는 만큼 분산값을 설정하고 추가적인 filter를 적용하거나 제외해야 한다. 따라서 concept만 catch해 나가면 된다.
검은 아스팔트 도로 위에 우리가 원하는 차선인 흰색과 노란색 선을 뚫으려면 어떤 방법이 있을까.전공지식을 알고 있다면 선이란 색깔이 급격하게 변하는 것이라고 볼 수도 있고, 혹은 그 자체인 특정한 색에 대한 정보를 포함하고 있으므로 이를 착안해 필터링하면 될 것이다.
이 때문에, gradient 를 추출한 필터링 결과와 황색 백색선을 추출한 필터링 결과를 정합하는 것으로부터 시작한다.

(1) Gradient 추출 번역하면 경사도를 의미한다. (edge와는 다른) 급격하게 변화하는 부분을 찾음으로써 영상 처리에서는 general하게 Sobelfiltering으로 많이 찾기도 하지만 우리가 테스트한 환경에서는 노이즈가 되는 부분이 많아 보다 정교한 경사도 검출 필터링이 필요했다. 그것이 바로 Scharrfilter이다.(셔를 필터라 읽는다.) 아래 블로그에 설명이 더 자세하게 적혀 있다.
이를 이용하여 수평 수직 방향의 gradient 성분을 찾고, 이를 summation 하면 모든 방향의 gradient를 검출할 수 있다. 이렇게 되면 차선 부분이 검출되고 주변의 noise에 대한 부분도 함께 검출될 것이다.
https://talkingaboutme.tistory.com/entry/OpenCV-Scharr-filterLearningOpenCV를 보시면 sobel 미분에 상세하게 scharr 필터에 대한 내용이 들어가 있습니다. 전회의 포스트에서는, 소벨 미분은 각 축에 대한 미분을 실시해 다항식을 근사화시킨 결과라고 말했습니다.talkingaboutme.tistory.com (2) 황색 백색선 검출 차선의 색 구분을 위해 적용하는 process이다. 백색 영역은 RGB 영역에서 upper lower thresholding 값을 실험적으로 찾아내 검출하고 황색 영역은 HSV로 변환한 뒤 upper lower thresholding 값을 실험적으로 찾아내 검출한다.
그 다음으로 지문인식에 사용하는 영상처리 기법 중 Thickened 기법이 있는데 이를 적용하면 검출된 결과가 더 증폭된다.
(1)(2)에 의해 필터링된 화상은 bitwise and 연산자로 정합한다.
(3) Medianfiltering 정합된 이미지에도 테스트 환경에서는 점과 같은 Noise가 다수 존재했다 이 부분은 saltand peppernoise로서, Medianfiltering으로 제거할 수 있다. Medianfiltering은 픽셀 값을 오름차순으로 정렬하고 가운데 값을 선택하여 픽셀 값을 결정하는 필터링이다.
이렇게 하면 최종적으로 검출된 차선을 확인할 수 있게 된다.
다음 포스트에 이어서 계속