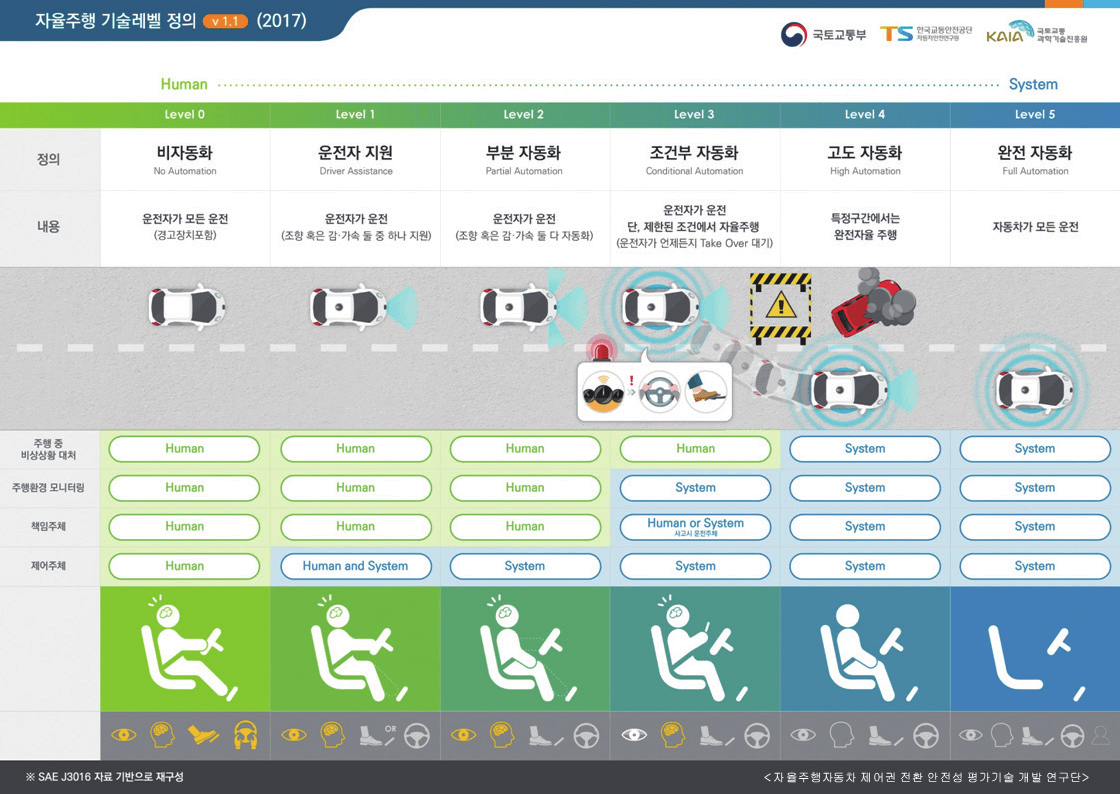
자주식 농업 기계의 자율성 레벨 분류에 관한 연구 1김·욘 주 2,3*김·하쿠인 4,5정·창우 4김·원스 2*해당 저자:****@@***. ac.kr도로 상의 자동차 부문을 추상화, 자동 운전 기술 수준은 SAE International이 제안한 J3016에 따라서 정의된다.그러나 농업 기계 분야에서는 자동 운전 기술에 대한 다른 수준의 표준화된 분류 없이 국가와 회사별로 다른 기준이 적용되며, 농업 기계의 자동 운전 기술을 명확하게 정의하고 정확히 평가하기는 어렵다.본 연구에서는 경작, 살포, 수확 등 다양한 농업 운영을 더 잘 특성화하기 위해서 SAE International J3016을 수정하고 자동 농업 기계(ALAAM)의 자율성 수준을 분류하는 방법이 제안된다.ALAAM은 직선·곡선 주행 경로&실장 운전, 운영, 환경 인식 오류 대응 등 농업 업무의 자동화 관련 항목별 운영자 및 자율 시스템 개입 현황에 따르고 0(수동)~5(완전 자동화)의 6단계로 분류된그리고, 작업 지역 계획.ALAAM분류의 핵심은 농업 기계 자동화를 위한 운영자와 자율 시스템 간의 상대적인 역할에 기초하고 있다.제안된 ALAAM은 자주식 농업 기계의 자율 주행 수준을 분류하는 기준의 제정을 촉진할 것으로 기대된다.키워드:농업 기계, 자율 기술, 자동 운전, 자동 운전, 자율적 분류 소개(Jeong et al., 2019).자율주행 기술은효율성이 높을뿐만 아니라운전자의 피로, 질병등으로 인한주의가 필요할때 주행의주요 기능을담당함으로써안전성을 확보할수 있다는이점이 있다(Fagnant and Kockelman, 2015).이러한 자율주행기술은 4차산업혁명에따라 인공지능, 빅데이터, 사물인터넷, 고성능센서 등과같은 요소기술들의개발 가속화로인해 더욱빠르게 개발되고있다(An and Park, 2018;Kim et al., 2020b).이때까지 자율주행기술은 보급대수가 가장많고 산업규모가 큰자동차 분야에활발히 적용되어왔으나(Han et al., 2019a), 최근자동차뿐만아니라 건설기계및 농업기계등 다양한산업분야에확대되어 적용중이다(Jeong and Cho, 2020;Kim et al., 2020a).자율주행 기술이란직접적인 수동물리적 제어또는 운전자의감시 없이도차량이 주행할수 있도록하는 기술을의미하며, 자율주행차량은 특정자율주행 기술레벨을 갖춘차량을 의미한다(Lee et al., 2021).자율주행 차량의성능 및 안전등을 평가하기위해서는 차량에장착된 자율주행시스템의기술 수준을동일한 지표를통해 평가해야하며, 이때필요한 것이자율주행 기술레벨이다.자동차 분야의자율주행 기술의레벨은 2013년 5월미국 도로교통안전국(National Highway Traffic Safety Administration, NHTSA)에서 처음제시 하였으며, 기술레벨을 0부터 4까지 5단계로구분하였다(NHTSA, 2013).NHTSA가 자율주행기술 레벨을제안할 당시에는자율주행 기술이구체적이지않았으므로, 이를보완하기 위하여 2016년 9월국제자동차기술자협회(Society of Automotive Engineers International, SAE International)는자율주행 표준’SAE J3016’에서자동차 분야의자율주행 레벨을0부터 5까지6단계로 세분화하는것을 제안하였다(SAE international, 2016):1)Level 0:비자동화, 2)Level 1:운전자지원, 3)Level 2:부분자율주행, 4)Level 3:조건부자율주행, 5)Level 4:고도자율주행, 6)6)Level 5:완전 자율주

온로드 차량 자율주행 기술 수준 분류(SAE J3016)

온로드 차량 자율주행 기술 수준 분류(SAE J3016)

레벨 BAST (독일) NHTSA (USA) SAE J3016 (국제) 0 드라이버만 자동화 없음 자동화 없음 보조기능† 고유 자동화 어시스트 2 부분 자동화 복합 기능 자동화 부분 자율 3 하이 오토메이션 제한된 자율주행 오토메이션 조건부 오토메이션 4 완전 자동화 완전 자율주행 자동화 하이 오토메이션 5–완전 자동화
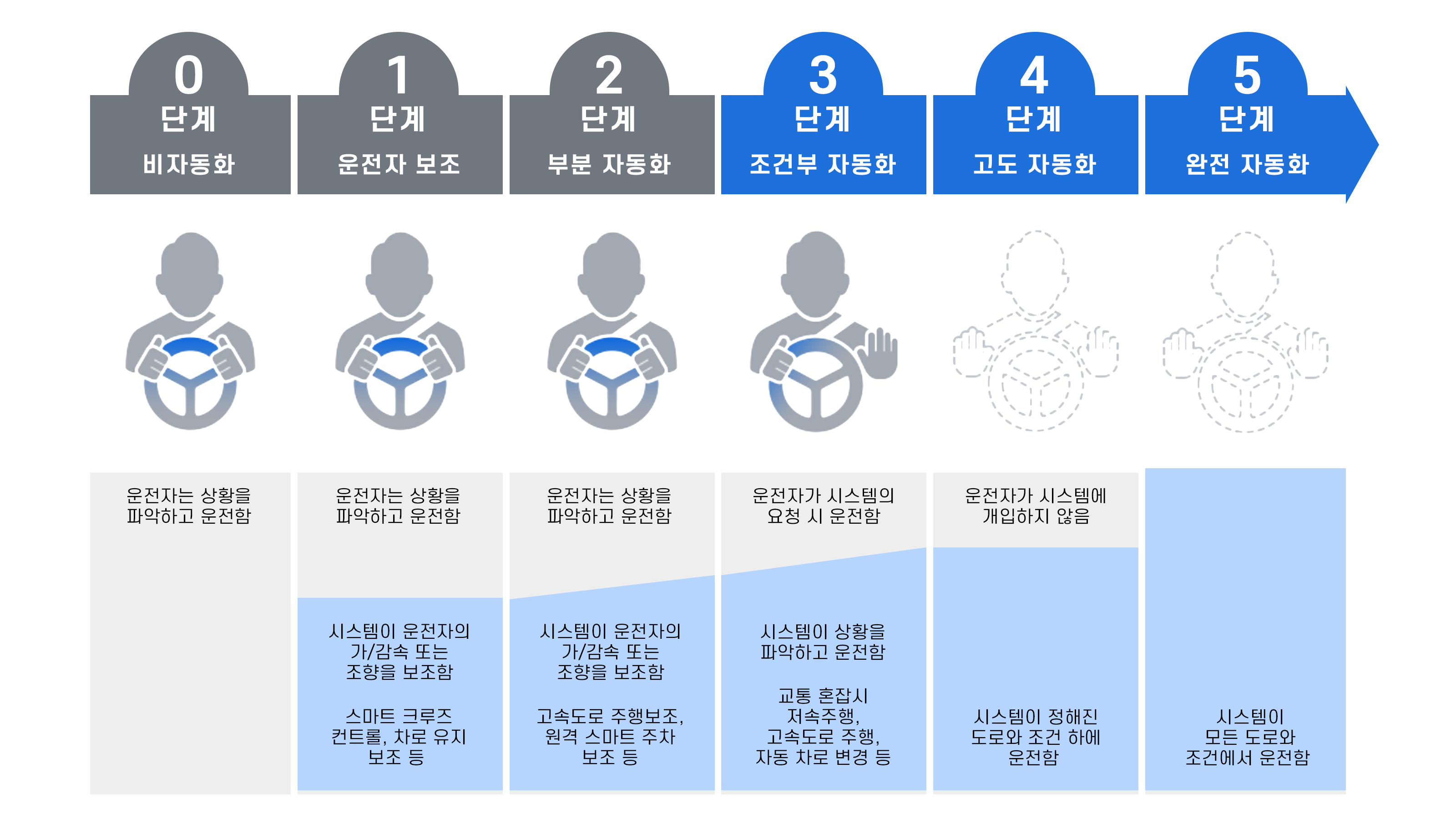
표 2. 온로드 차량의 자율주행 시스템 레벨 분류에 따른 특징(We volver, 2020).

레벨 분류 012345 Term Noautomation 드라이버 지원 부분 자동화 조건부 자동화 고급 자동화 전자동 제어 연산자 휴먼 시스템 시스템책임 Human Human Human/System 시스템 작동상태 올온풋오프 핸드오프 아이오프 마인드오프 올오프 올오프 올오프
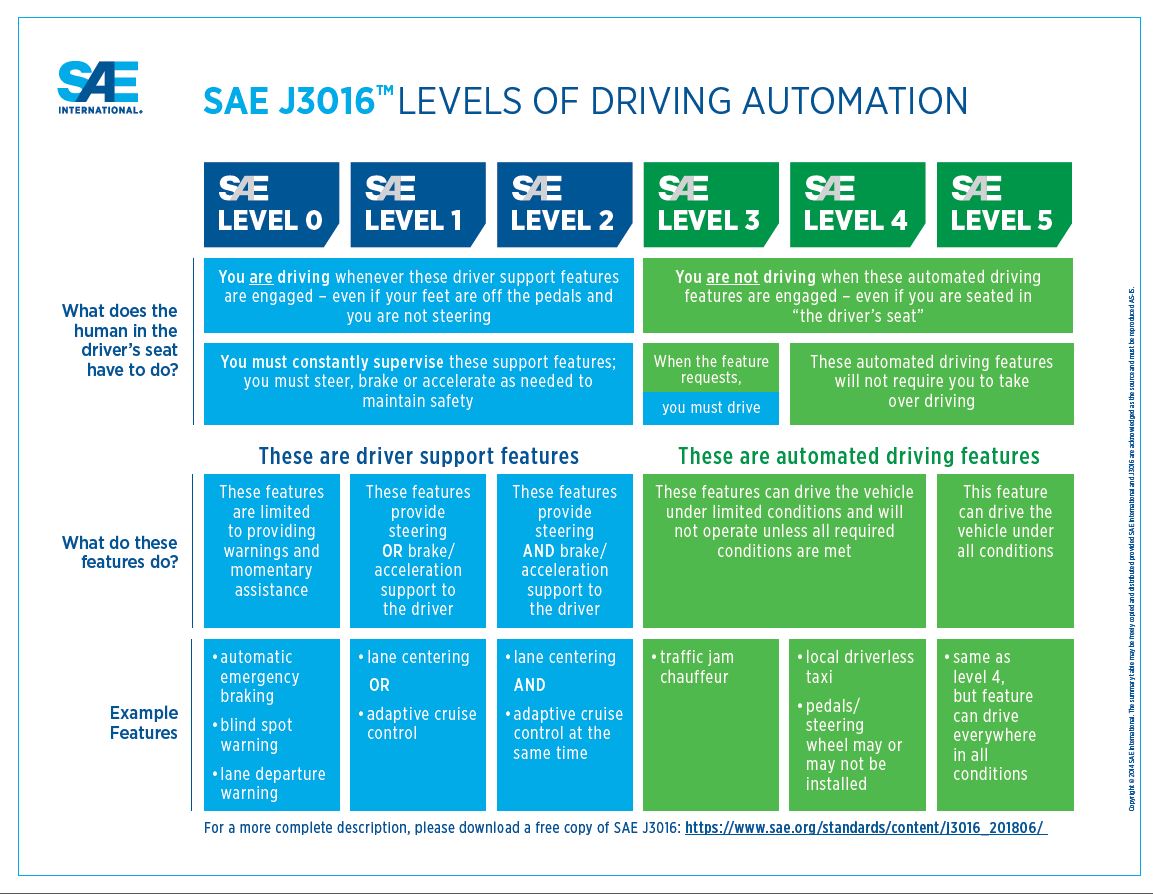
표 3. 자율형 농기계 수준별로 정보를 입력한다.
_%EC%9E%90%EC%9C%A8%EC%A3%BC%ED%96%89_%EB%A0%88%EB%B2%A8.png?type=w800)
Level Parameters Contents 1 운영자 정보 농가 정보 농작물의 종류 농지 정보(장소, 토양 등)2 기기 정보 기계정보(기종명, 규격, 사양) 선회반경 회전감도 GPS 보정(GPS 수신기의 위치) 3실장정보 실장정보(모델명, 표준, 사양) 설치방법(견인, 장착, 반설치) GPS 캘리브레이션(엔드포인트 구현을 위한 GPS 리시버로부터의 거리) 4경로 계획과 추적방법 경로 설정(직선, 곡선) 경로 변경 기능(스티어링 방법 등) 5곶 정보 경계 설정 곶의 설정
Level Parameters Contents 1 운영자 정보 농가 정보 농작물의 종류 농지 정보(장소, 토양 등)2 기기 정보 기계정보(기종명, 규격, 사양) 선회반경 회전감도 GPS 보정(GPS 수신기의 위치) 3실장정보 실장정보(모델명, 표준, 사양) 설치방법(견인, 장착, 반설치) GPS 캘리브레이션(엔드포인트 구현을 위한 GPS 리시버로부터의 거리) 4경로 계획과 추적방법 경로 설정(직선, 곡선) 경로 변경 기능(스티어링 방법 등) 5곶 정보 경계 설정 곶의 설정

그림 1. 도로 위 차량의 동적 운전 과제를 나타내는 운전 과제의 개략도(SAE International, 2016).제2도 농기계 자율시스템의 개략도.그림 3. 자율형 농기계의 수준 분류.인용이 필요하신 분은 학술연구정보서비스 riss.kr 에서 namkyuchul로 검색해주세요.