- 자율주행의 핵심 – 정밀지도
- : 도로와 주변 지형의 3D정보를 담아 오차범위 10~20cm 이내에서 식별할 수 있는 신뢰성 높은 지도, 기존 차량센서를 보완하여 오차범위를 크게 축소할 수 있음.
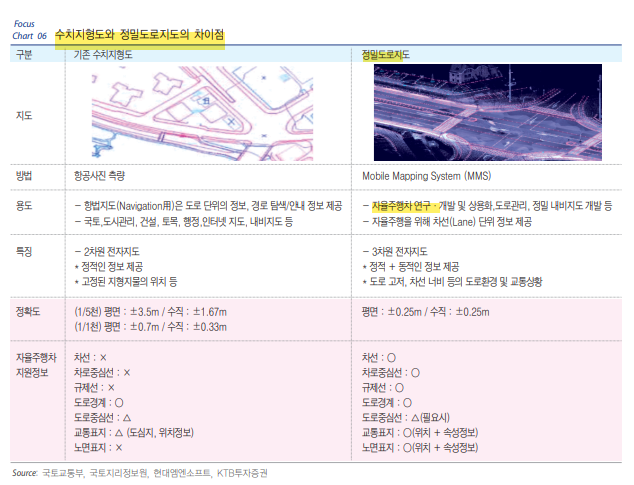
- 제작과정 : MMS(Mobile Mapping System)를 통한 3D 지형, 도로 데이터 수집 및 가공 작업 필요 용량이 커서 실시간 정보 송수신 및 업데이트 가능한 V2X 기술 발전 필요
- – 자율주행으로 정밀지도가 필요한 이유
- : 자율주행인지 – 판단 – 제어프로세스로 진행인지 능력에서 GPS, 카메라, 레이더, 라이더 등 다양한 센서가 서로 보완하는 가운데 오차가 발생할 경우 사고발생을 보완하기 위해 오차범위 10~20cm 이내의 3D지도 필요
- * 레이더(RADAR) : 전자기파 발사 후 회수하면서 물체인식/분석야간사용가능, 측정거리가 길어 탐지물체 종류인식이 어려워 신호 흡수과정에서 난반사가 일어날 경우 정보 정확성 훼손
- *라이더(LIDAR) : 레이저빔의 시간, 파장, 세기에 따른 흡수차, 파장 이동 등을 분석하여 대기 상태, 물질 검출, 물체와의 거리 위치 측정, 주변 환경의 3차원으로 인지하는 장점, 악천후 물체의 색상에 민감함
- 2015년 4월 독일 3사(Audi, BMW, Daimler) Here 인수 From 노키아->텐센트, 인텔까지 Here 지분 인수->북미, 유럽 해당 지역 내 점유율 80%, 캐나다 Tomtom과 글로벌 자동차 내비지도 시장 지배 중
- – 일본 9개사(Toyota포함) DMP(Dynamic Map Planning) 공동 설립 ->
- – Mobileye(intel) 정밀지도 구축 진행 중 intel here에 지분 투자 -> 2016년 12월 모빌아이 Here와 전략적 파트너십 체결
국내 업자의 동향
- 현대엠앤소프트
- : 1998년 MANTOPN 소프트 → 2005년 현대차그룹 인수, 2011년 현대 M&s로 사명 변경 → 현대기아자동차 탑재 정품 내비기술 국산화 100% 달성 (지니, 스피드 내비, 매피 내비 SW 출시) → 16년 내비단말사업 모바일 어플라이언스에 매각 후 인포테인먼트 SW 기업 성장 목표 → 2011년부터 초정밀 지도시스템 구축 개시 → ADAS 지도G90, G90, 16년 내비게이션