
(사진=셔터스톡)라이더(LiDAR)와 레이더(RADAR). 이름도 비슷하다. 그러나 글로벌 자율주행차 업계를 갈라놓을 정도로 둘은 다르다.라이다와 레이더는 한마디로 자율주행차의 ‘눈’을 담당하는 이미지 센서다. 이 가운데 무엇이 더 효율적이냐는 문제를 놓고 업계에서는 오랜 논쟁을 이어왔다.2019년 일론 머스크는 테슬라 자율주행 시연 행사 당시 “라이더는 바보들의 심부름꾼(Li DAR is a fool’serrand)”이라며 라이더에 회의적인 입장을 보였다. 이에 테슬라는 레이더만 탑재한 자율주행 기술 FSD(Full Self-Driving)를 개발, 출시했다.반면 구글 웨이모와 중국의 테슬라로 불리는 엑스펑 등은 라이다가 자율주행에 필수 요소라고 말한다.유명 자율주행차 업계 거물들도 의견이 갈리는 라이더와 레이더. 둘은 대체 무엇이 다를까.◆라이더&레이더, 대체 뭐였지?

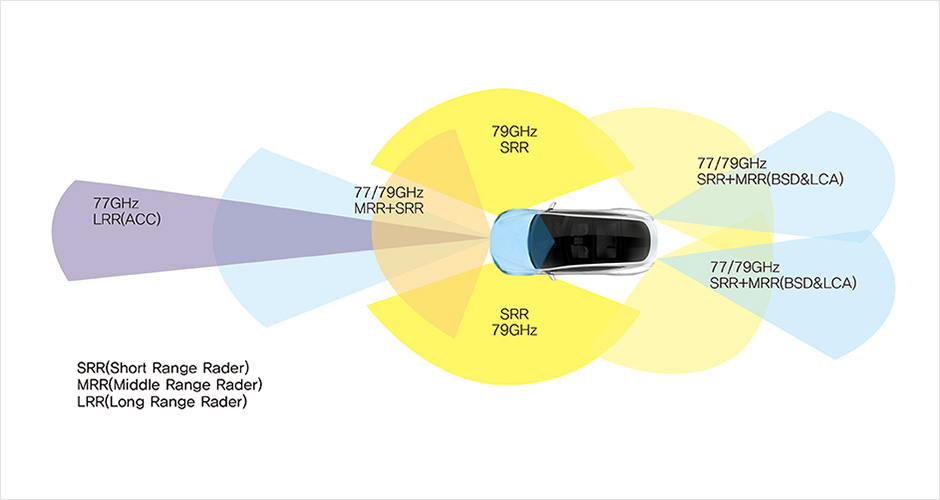
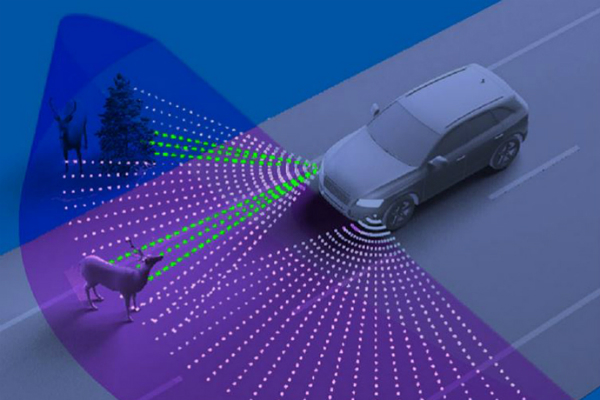
라이다 센서(사진=셔터 스톡) 2개의 최대 차이라고 하면, 사물을 보는 방법이다. 사람의 눈은 반사된 태양광을 매개로 사물을 본다. 라이더의 경우 레이저(빛), 레이더는 전파를 매개체로 한다.라이더(Light Detection And Ranging)는 고출력 레이저 펄스를 발사해 레이저가 목표물에 맞고 돌아오는 시간을 측정한다. 이에 물간거리, 형태를 파악한다. 비행시간거리측정(ToFTime of Flight) 기술로도 불리는 이유다.레이더는 라이더와 같은 방식으로 작동하지만 레이저 대신 전파를 이용한다는 점에서 다르다. 전파를 발사하여 물체에 맞고 돌아오는 데이터로 물체의 거리, 속도, 방향 정보를 파악한다.전파 도달 거리에 따라 단거리, 중거리, 중장거리 등으로 나뉜다. 전파 파장이 길수록 도달할 수 있는 거리가 길어진다. 하지만 상대적으로 정확도는 떨어진다는 약점도 있다.◆라이더 vs 레이더 장단점 비교 사물을 인식하는 방법이 다른 만큼 성능에도 차이가 있다. 그러나 업계에서 갑론을박이 이어지는 만큼 어떤 센서가 더 낫다고 단정할 수는 없다.이에 분야별로 라이더와 레이더의 장단점을 비교해본다.①정밀도 : 라이더 Win’정밀도’ 면에서는 라이더가 리드하고 있다. 라이다가 자율주행자 이미지 센서로 주목받는 이유이기도 하다. 라이더는 직진성이 강한 1550nm 근적외선을 이용한다. 강한 직진성 덕분에 레이저가 물건을 맞고 돌아오는 동안 왜곡이 발생하지 않는다. 이에 대상을 보다 정밀하게 인식한다. 오차범위가 mm~cm에 불과할 정도로 정밀 관측이 가능하다.라이더는 거리를 비롯해 폭과 높낮이 정보까지 측정해 대상을 3차원으로 인식한다. 정확도를 높이는 요인이다. 라이다 센서는 레이저를 여러 개로 나누어 발사한다. 16, 32, 64개 등 나뉘는 레이저 채널 수가 높아질수록 세밀한 인식이 가능하다. 이에 도로 환경을 3D 매핑하기도 쉽다.

(사진=Popular Science) 반면 레이더는 사물의 정확한 형태까지 인식하지 못한다. 전자파가 돌아오는 신호를 기반으로 물간거리, 속도, 방향 등을 예측만 가능하다. 이에 주변 물체를 인식할 수 있는 광학 카메라와 함께 작동해야 한다.②가성비: 레이더 윈 자율주행차 업계에서 라이다가 환영받지 못하는 가장 큰 이유는 바로 ‘비싼 가격’ 때문이다.2010년 웨이모가 처음 자율주행 기술을 선보였을 당시 라이다. 센서 가격은 7만5000달러(약 8200만원)에 달했다. 보통 차 한 대보다 비싼 가격이다.이후 2019년 허니콤(Honeycomb)이라는 라이다 유닛을 자체 개발했지만 7500달러 가격으로 여전히 고가였다. 일론 머스크는 라이더를 ‘비싼(쓸모없는) 맹장’이라고 표현하기도 했다.이 때문에 벨로다인(Velodyne)을 비롯한 라이다 센서 생산 기업들은 단가 인하에 매진하고 있다. 올해 CES2021에서 벨로다인은 11만원(약 100달러)의 라이다 센서를 선보였다. 기존 360도 관측이 가능했던 라이다 센서의 시야각을 좁혀 성능을 낮춘 대신 가격 경쟁력을 보완하는 시도였다.③외부 환경 극복 : 레이더 Win
(사진=셔터스톡) 레이더는 라이더에 비해 비, 안개 등 악천후에 강하다. 날씨가 좋지 않으면 라이더의 성능은 대개 떨어진다.전파의 경우 광파에 비해 물체에 닿았을 때 흡수되는 정도가 적다. 그래서 외부 환경의 방해도 적다. 레이더가 악천후에도 작동해야 하는 전투기, 전투함 등에 활용되는 이유다.④디자인: 레이더 윈라이더 센서는 레이더에 비해 소형화 기술이 발달하지 않았다. 이에 차량에 탑재할 때도 외관에 나타난다. 웨이모 자율주행차를 보면 차량 루프탑에 라이다 센서가 달려 있다.
(사진=웨이모 홈페이지) 한편 FSD 기능이 탑재된 테슬라 차량의 경우 12개의 레이더 센서를 탑재하고 있지만 외적으로는 특별한 특이점이 보이지 않는다.⑤감지거리: 무승부라는 30m에서 200m 범위 내의 물체를 감지한다. 하지만 30m 이내에 근접한 물체를 식별할 때는 성능이 떨어진다.레이더의 경우 주파수에 따라 감지할 수 있는 거리가 다르다. 중장거리 레이더의 경우 150200m 이상 감지할 수 있다. 단거리 레이더는 100m 이내의 거리를 감지한다.하지만 감지거리가 길어질수록 시야각은 줄어든다. 중장거리의 경우 40도 내외로 좁고 단거리는 100도 이상으로 상대적으로 넓다.반면 차량과 가까운 초단거리의 경우 라이다, 레이더보다는 음파를 기반으로 한 초음파 센서가 주로 활용된다.◆국내 기업의 선택은?…라이더 레이더 경쟁자뿐만 아니라 테슬라, 웨이모 등이 이미지센서 선택을 놓고 입장이 갈리듯 국내 기업들도 저마다 주목하는 센서가 다르다.지난 1월 자율주행차 기술기업 뷰론테크놀로지는 차량에 라이다 센서만 탑재해 자율주행에 성공한 바 있다. 서울에서 부산까지 최대 속도 100km로 약 410km를 운전했다.

(사진=뷰론테크놀로지) 광주과학기술원 박사과정 연구원이 모여 설립한 스타트업 SOS랩은 자율주행차 광각 고정형 라이다 기술을 개발한다. 라이다 센서 렌즈의 화각을 고도화해 최대 180도 시야각을 구현한다. 올해 CES 2021에 참가해 차량용 라이다 기술을 선보이며 혁신상을 수상한 바 있다.한편 국내 포티투닷은 카메라와 레이더만 조합해 자율주행 기술을 개발한다. 올 상반기 서울 마포구 상암지구에서 완전자율주행을 의미하는 레벨4 자율주행 시범서비스를 시작한다고 밝힌 바 있다.그러나 뷰론 테크놀로지와 포티투닷 모두 하나의 센서를 고집하는 것은 아니다.뷰론테크놀로지 측은 라이다 센서를 집중 개발해 향후 타사 기술과 자율주행 융합 솔루션을 구축할 계획이라고 밝혔다.포티투닷도 현재는 가격 문제로 라이더를 고려하지 않을 뿐 향후 가격 인하 시 ‘라이더+카메라+레이더’를 고려할 수 있다는 입장이다.이처럼 라이다와 레이더, 그리고 카메라를 합쳐 센서 퓨전(Sensor Fusion)을 이루려는 노력도 있다. 라이더와 레이더가 결코 대적점에 있는 것은 아니다.날씨 등 환경 변화에 취약한 라이더를 대신해 레이더가 그 역량을 대신할 수 있다. 뿐만 아니라 사물의 정밀 인지도가 떨어지는 레이더의 기능은 라이다가 대신할 수 있다.